ペダリングアルゴリズム(4節リンク機構編その2)
本シリーズでは、様々な観点からペダリングの仕組みを理解し、どのようにすればペダリングスキルが向上するかについて考察していく。第2回目は、4節リンク機構で近似されたペダリング動作の死点について紹介し、ペダリングの各フェーズにおいて使用すべき筋肉について考えていく。
連載の一覧はこちら。
- 4節リンク機構編その1(近似モデル)
- 4節リンク機構編その2(死点)← 本記事
- 4節リンク機構編その3(データ検証:ハムストリング)
- 4節リンク機構編その4(データ検証:大腿四頭筋)
※諸注意
この記事は、できるだけ客観的なデータや論文、論理的思考や根拠に基づいて書くように努力していますが、あくまでも私個人の考察・意見です。また、私個人の体験、さらには他人が提唱した仮説を元に構成された考察もあります。もしこの記事を参考にする方は、そのことを十分に承知したうえで自己責任でご活用ください。
前回の復習
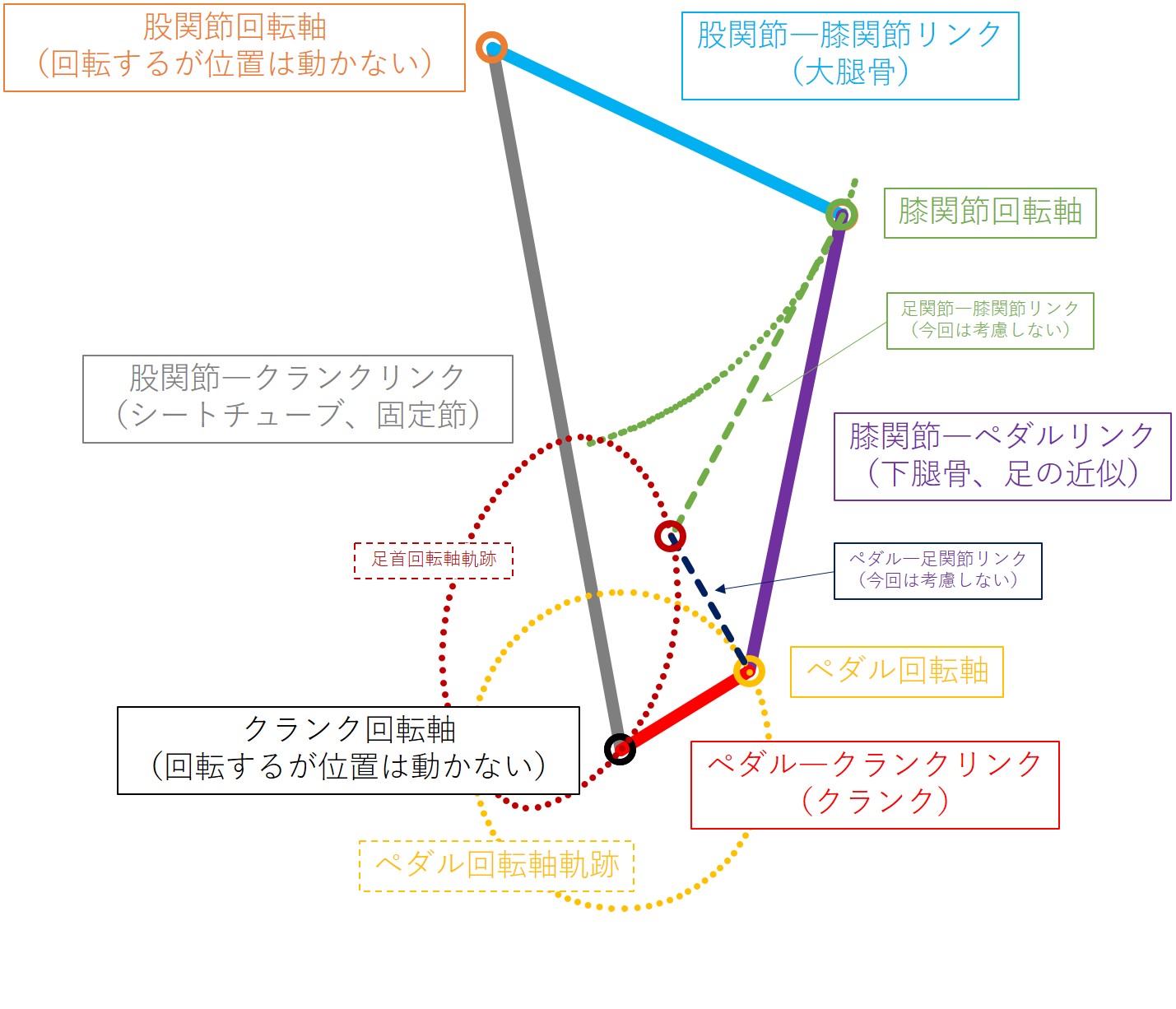
前回の記事では、2次元平面上で考えたペダリング動作を、股関節回転軸及びクランク回転軸の絶対位置は動かず、さらに足関節は動かない仮定して4節リンク機構に近似した。図1に、前回の記事でも示したペダリング動作の2次元4節リンク機構近似モデルを再掲する。
また、今回の記事内で使用するモデルケースについても図2に再掲する。図2の例では、A = 165.0 mm、B = 385.0 mm、C = 486.5 mm、D = 746.0 mm、φ = 79°を用いている。

今回の記事では、4節リンク機構と筋肉との対応関係を紹介した上で、死点の意味について再考していく。また、機構学的に見てペダリングの各フェーズにおける最も効率が良い筋肉の使い方について考察する。
リンクと筋肉の対応関係
各リンクの長さによって4節リンク機構の動作は変化するが、ペダリングの動作は揺動運動を回転運動に変えるてこクランク機構となる。各リンクには役割があり、機構において最初にエネルギーを取り入れて動くリンクを原動節といい、原動節によって動かされるリンクを従動節と呼ぶ。また、原動節と従動節の間で運動の伝達を行うリンクを中間節、固定されて動かないリンクを固定節と呼ぶ。ここで、股関節―クランクリンクが固定節、クランクが従動節であることは明らかだ。原動節と中間節は、動作入力に用いる筋肉によって変わるため後で扱う。
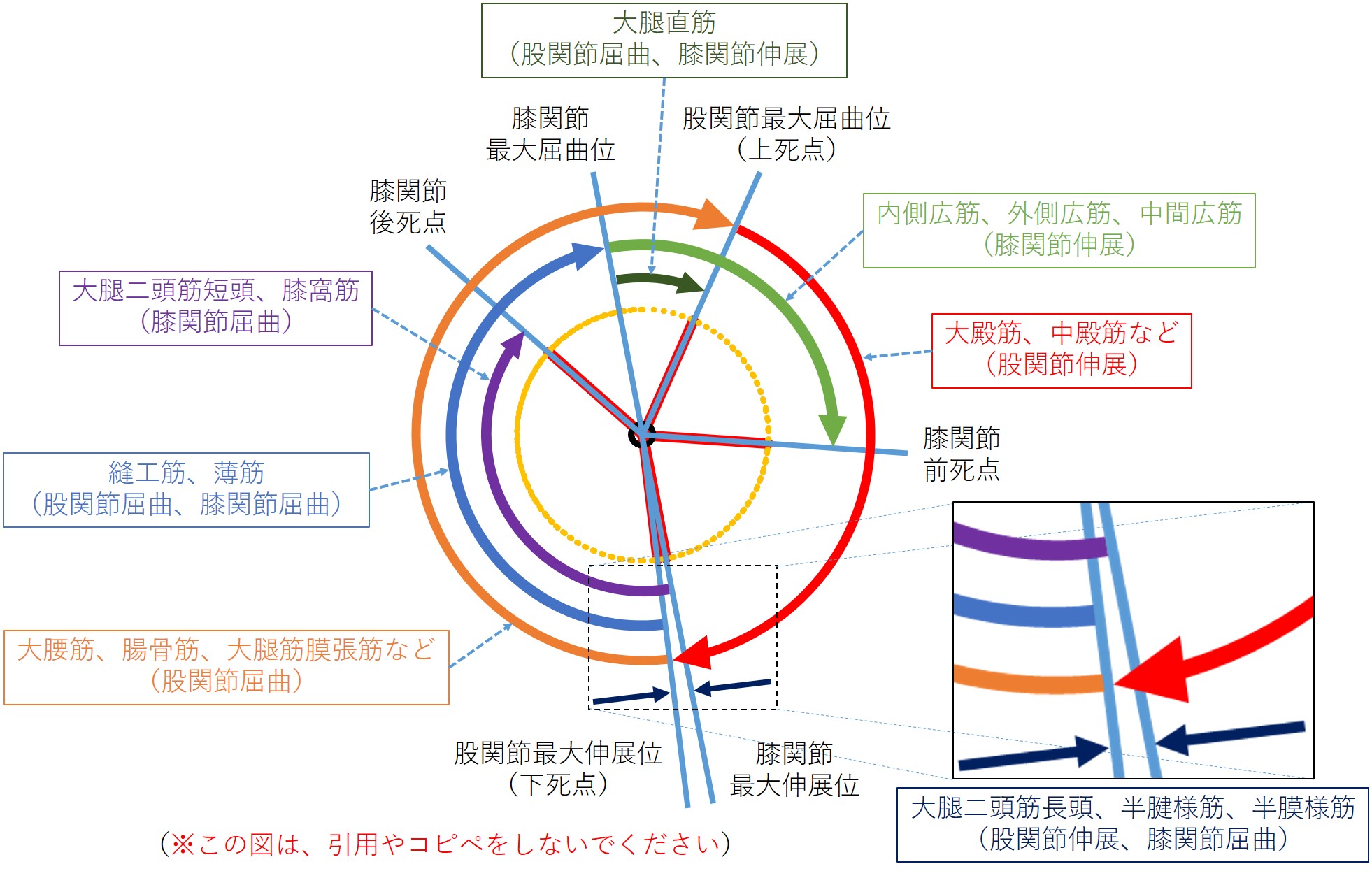
人間は筋肉によって関節を動かすことが出来る。ここで、関節やリンクに対する筋肉の対応関係を確認しておこう。なお、足関節は動かないと仮定しているため、腓腹筋など主に足関節に作用する筋肉はリストアップしていない。また、股関節の内転や外転に強く作用する筋肉(薄筋以外の内転筋群と股関節に関連する筋肉の一部)は平面上に作用しないとして省略している(「など」の中に含まれていると考えて頂きたい)。
- 股関節伸筋群(大殿筋、中殿筋など)
- 図1において、股関節回転軸を時計回りに動かすトルクを発生させる。股関節―膝関節リンクが原動節、膝関節―ペダルリンクが中間節となる。
- 股関節屈筋群(大腰筋、腸骨筋、大腿筋膜張筋など)
- 図1において、股関節回転軸を反時計回りに動かすトルクを発生させる。原動節と中間節の対応関係は股関節伸筋群と同じ。
- 膝関節単関節伸筋群(内側広筋、外側広筋、中間広筋)
- 図1において、膝関節回転軸を反時計回りに動かすトルクを発生させる。膝関節―ペダルリンクが原動節となる。また、直接従動節であるクランクに力が伝達される。
- 膝関節単関節屈筋群(大腿二頭筋短頭、膝窩筋)
- 図1において、膝関節回転軸を時計回りに動かすトルクを発生させる。膝関節―ペダルリンクが原動節となる。また、膝関節伸筋群同様、直接従動節であるクランクに力が伝達される。
- 大腿直筋
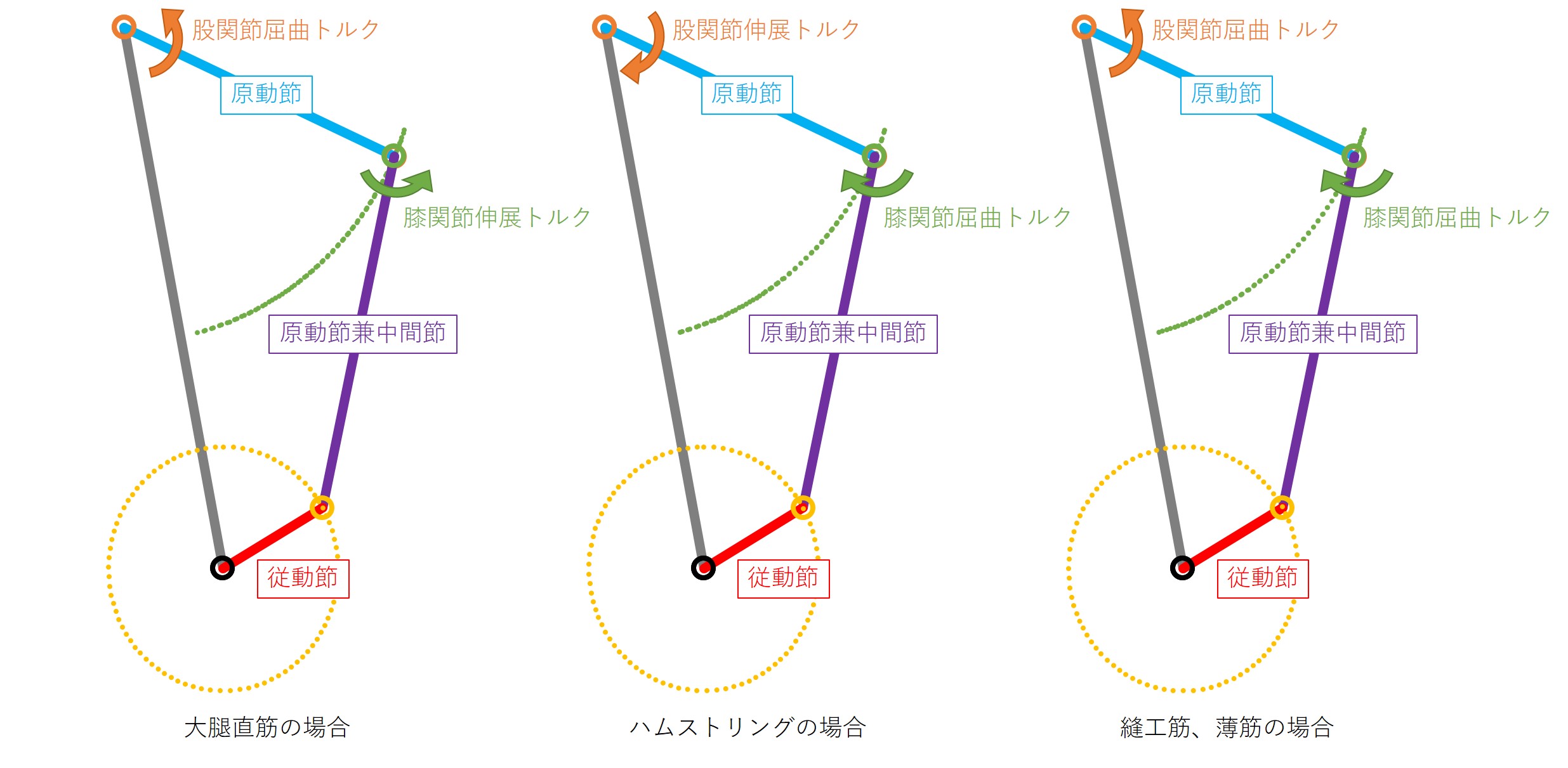
- 大腿四頭筋の1つで2関節筋である大腿直筋は、股関節を屈曲すると同時に膝関節を伸展する。図1においては、股関節回転軸を反時計回りに動かすトルクを発生させると同時に膝関節回転軸を反時計回りに動かすトルクを発生させる。このとき、股関節―膝関節リンクは原動節、膝関節―ペダルリンクは原動節兼(股関節―膝関節リンクに対応する)中間節となる。
- 大腿二頭筋長頭、半腱様筋、半膜様筋(大腿二頭筋短頭を除いたハムストリング)
- 2関節筋であるハムストリングは、股関節を伸展すると同時に膝関節を屈曲する。図1においては、股関節回転軸を時計回りに動かすトルクを発生させると同時に膝関節回転軸を時計回りに動かすトルクを発生させる。原動節は大腿直筋の場合と同様である。
- 縫工筋、薄筋
- 2関節筋である縫工筋と薄筋は、股関節を屈曲すると同時に膝関節を屈曲する。図1において、股関節回転軸を反時計回りに動かすトルクを発生させると同時に膝関節回転軸を時計回りに動かすトルクを発生させる。原動節は大腿直筋の場合と同様である。
図2に、各2関節筋におけるトルク方向の対応関係を示す。
4節リンク機構で近似したペダリングには2種類4カ所の死点が存在する
ペダリングについて議論するとき、「上死点は12時方向、下死点は6時方向」とよく言われる。そもそも死点とは何だろうか? 今一度確認しよう。死点とは、原動節からいくら力を加えても従動節が動かない位置のことを言う。4節リンク機構においては、(股関節―膝関節リンクを原動節としたときの)最も高い死点を上死点、最も低い位置を下死点と呼ぶ。
さて、お気付きだろうか。定義より死点の位置は何が原動節であるかによって変わるのだ。前節で見たとおり、原動節は考える筋肉によって変わる。ここからは、原動節別に死点の位置関係を見ていく。
念のため断っておくと、以降に出てくる位置関係は全て図2の例を用いた数値であり、ポジションによって位置関係や角度は自ずと変化する。全ての人に固有の位置関係があるはずで、以降に紹介する数字を鵜呑みにしないよう注意されたい。
股関節―膝関節リンクが原動節の場合の上死点・下死点
一般的に議論されるペダリングの上死点・下死点は、この場合にあたる。そして、何故かほとんどこの場合しか考えられていない。自転車以外におけるてこクランク機構の応用で、これ以外が原動節になる場合がほとんど存在しないため仕方がないか。
図3に、股関節―膝関節リンクを原動節としたときの上死点と下死点を示す。
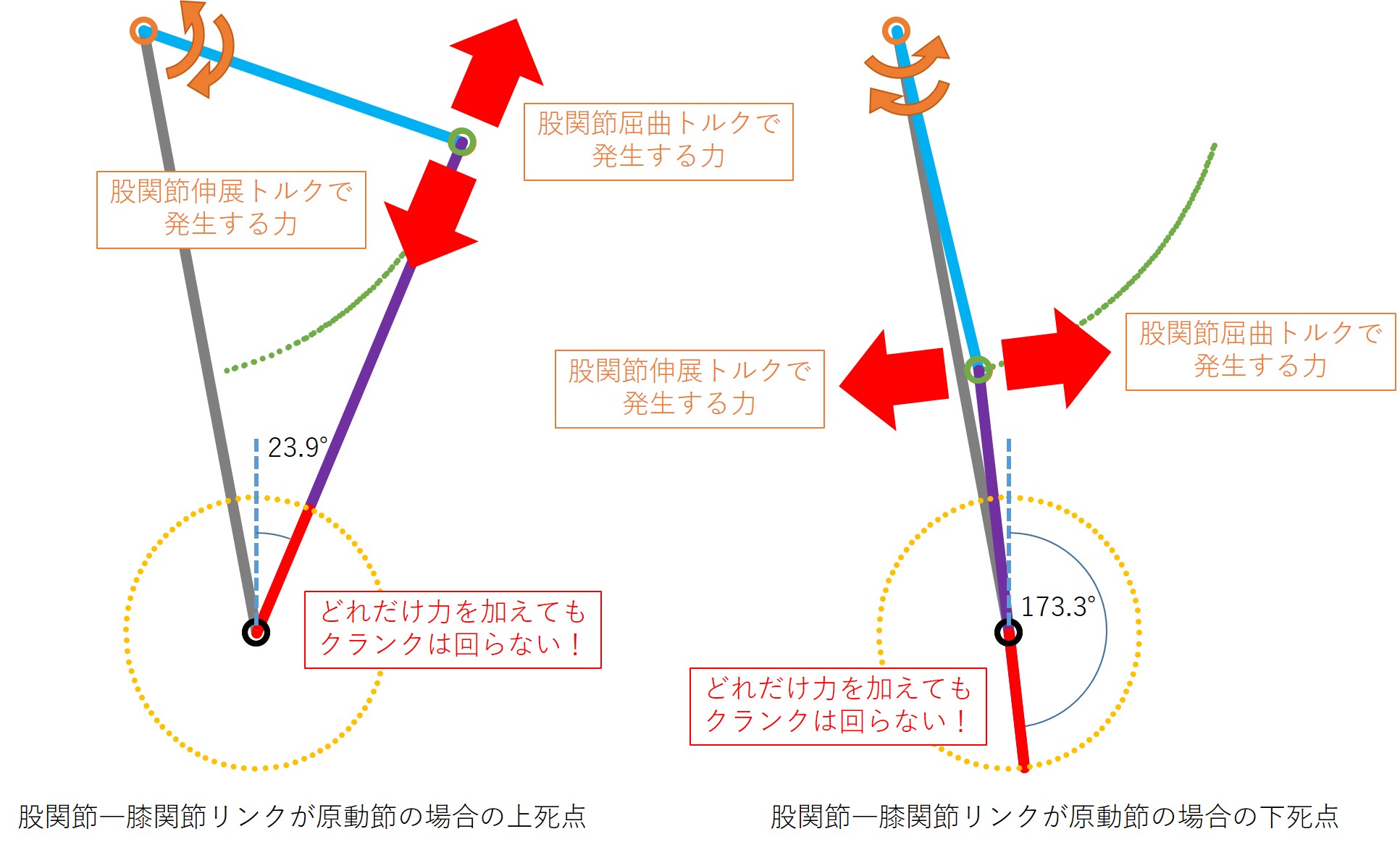
膝関節―ペダルリンクとクランクが一直線になっており、ペダル回転軸における軌跡の接線と直交している。すなわち、この状態だといくら股関節から力をかけてもクランクの法線方向にしか力が加わらず、クランクは回転しない。例で使用しているポジションだと、上死点の角度は12時から23.9°、下死点の角度はは12時から173.3°(6時から-6.7°)となっている。漠然とした「上死点は12時方向、下死点は6時方向」という表現はあながち間違ってはいないが、微妙にずれている。
……と、ここまでは恐らく誰でも知っている話。このとき注意したいのは、上死点は4節リンク機構における股関節最大屈曲位(大腿が1番持ち上がる位置)、下死点は4節リンク機構における股関節最大伸展位(大腿が1番押し下げられる位置)と一致することだ。すなわち、機構の動作に一致した筋肉の収縮を行っていれば、筋肉のエキセントリック収縮※が起こらないことを示している。
※エキセントリック収縮とは、筋肉が引き延ばされながら収縮すること。筋トレではエキセントリック収縮を利用すると効果的と言われているが、ペダリング動作等で使用すると脚が攣る原因になるとも言われている。
膝関節―ペダルリンクが原動節の場合の前死点・後死点
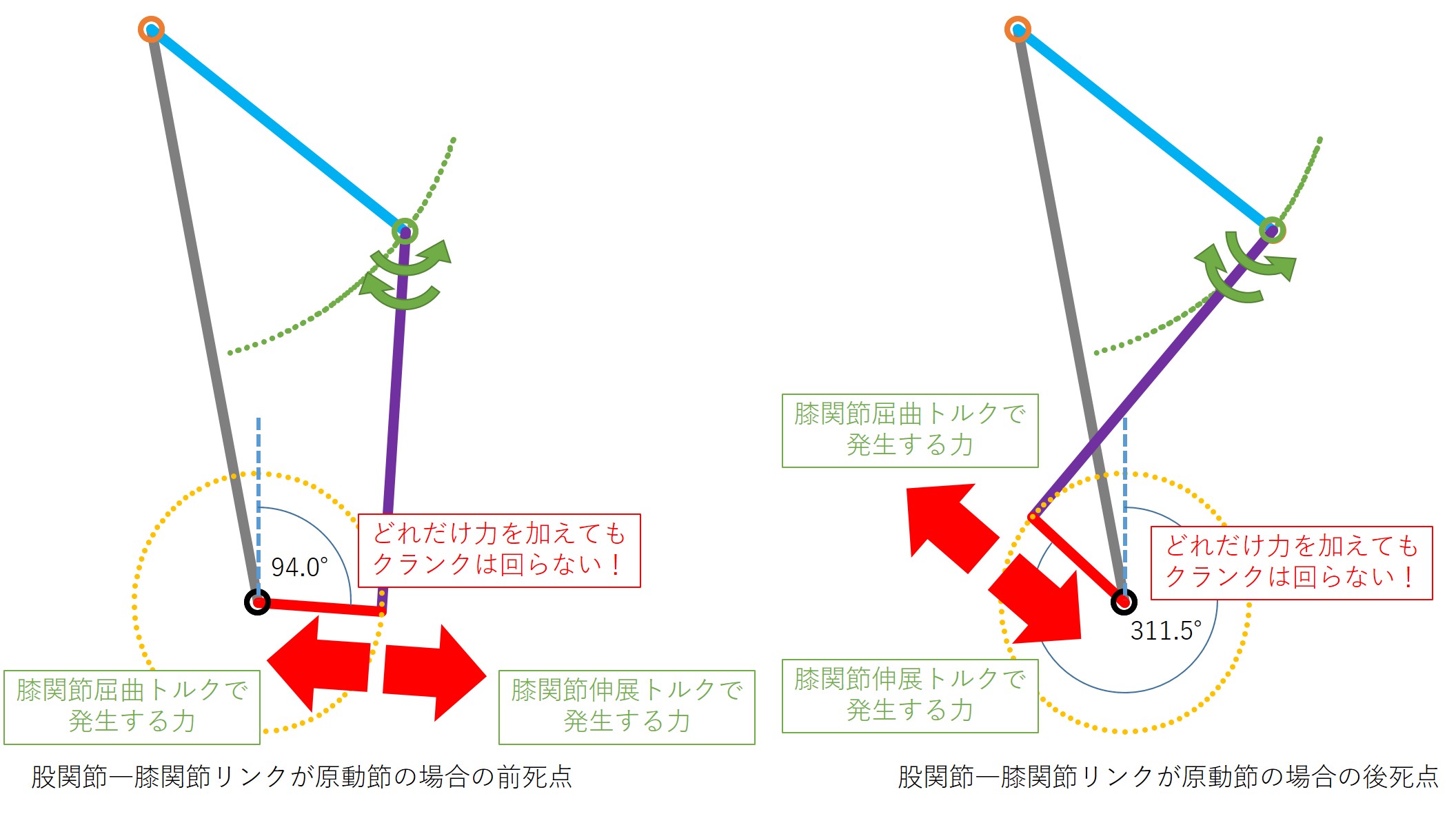
次に、膝関節―ペダルリンクが原動節の場合を考える。膝関節から力を掛けたとき、クランクの法線方向にしか力が加わらない位置が死点となる。すなわち、膝関節―ペダルリンクがペダル回転軸の軌跡と直交する位置を探せばよい。この場合も、先ほどと同様2カ所に死点が現れる。(機構学の教科書では普通扱われないため)ここでは便宜的に、クランク角0°から始まって最初に現れる死点を前死点、次に現れる死点を後死点と呼ぶことにする。
図4に、膝関節―ペダルリンクを原動節としたときの前死点と後死点を示す。
前死点、後死点共に、膝関節伸展トルクをかけようが屈曲トルクをかけようが、クランクが動くことはない。特筆すべきは、上死点と股関節最大屈曲位、下死点と股関節最大伸展位はそれぞれ一致していたのに対し、前死点と4節リンク機構における膝関節最大伸展位、後死点と4節リンク機構における膝関節最大屈曲位はそれぞれ異なるということである。まず、膝関節の機構学的な挙動を図5に示す。
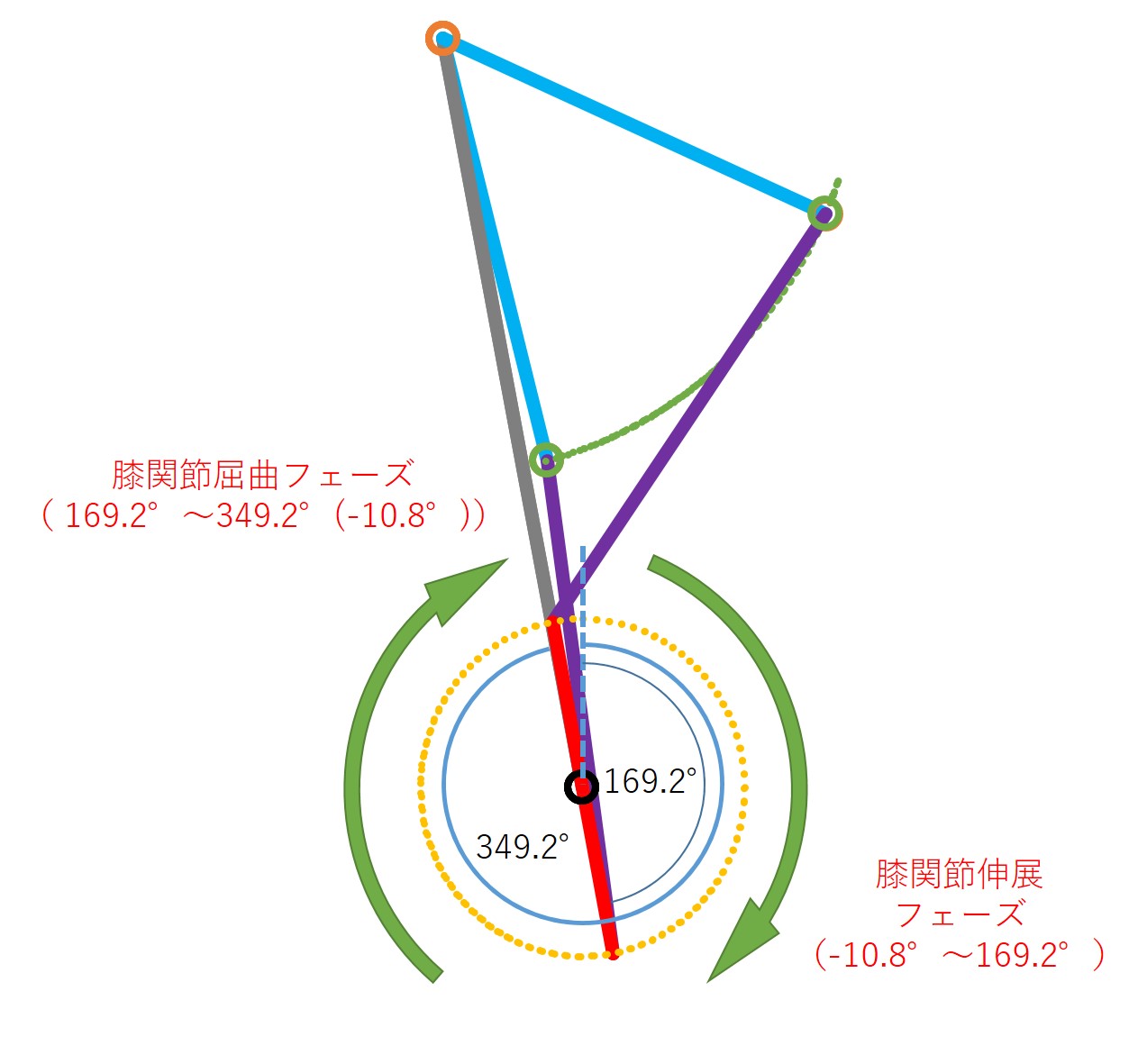
膝関節が伸展するのクランク角-10.8° (349.2°) から169.2°の間、膝関節が屈曲するのはクランク角169.2°から349.2°の間である。しかし、例で使用しているポジションで前死点と後死点を計算するとそれぞれ94.0°と311.5°となり、膝関節の最大伸展・屈曲位とは異なる。図6に、前・後死点と膝関節最大伸展・屈曲位の関係を示す。
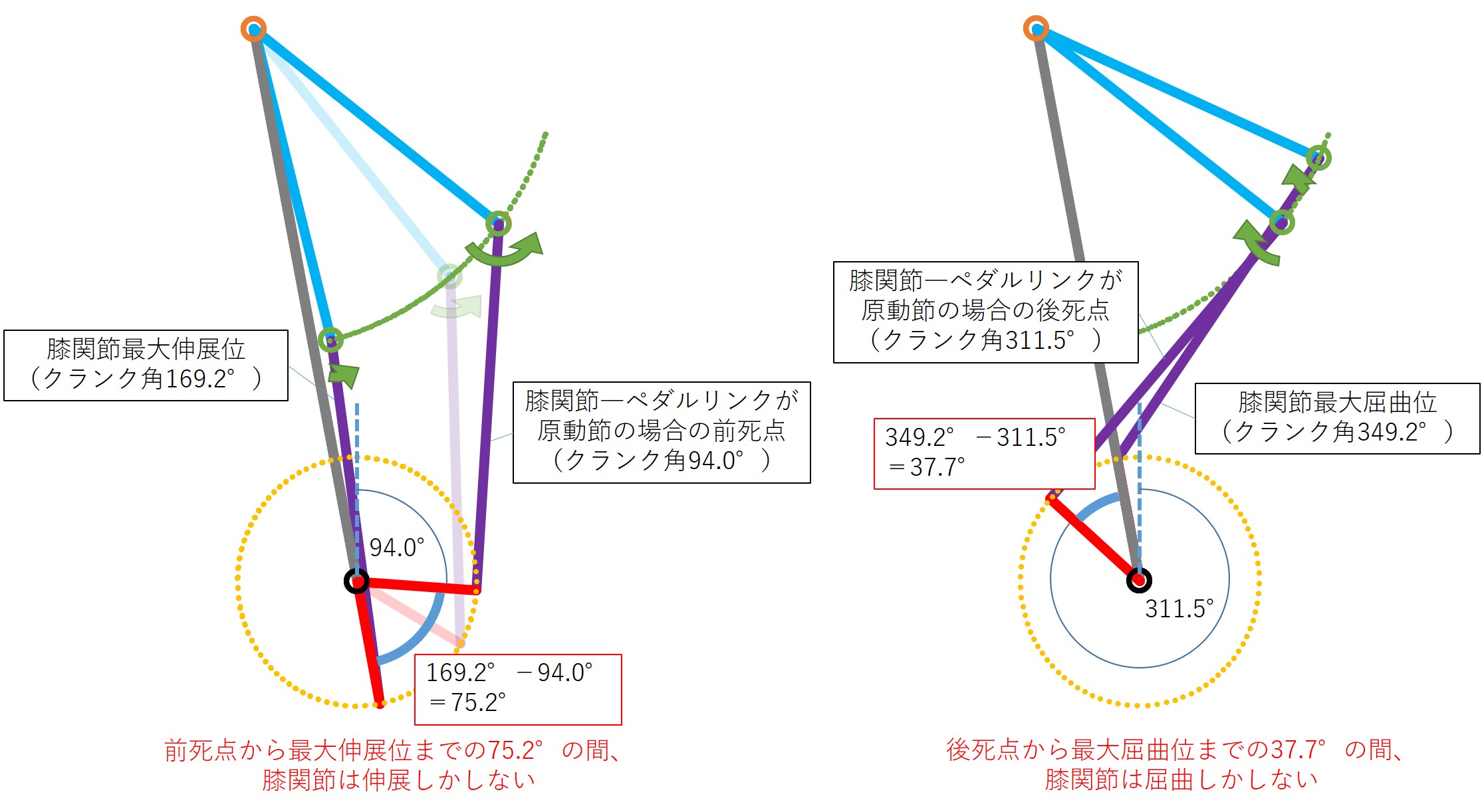
前死点と膝関節最大伸展位との差は75.2°、後死点と膝関節最大屈曲位との差は37.7°ある。
さて、ここからは前・後死点と膝関節最大伸展・屈曲位がずれているとどういうことが起こるのかを見ていく。まず、前死点と膝関節最大伸展位の間で膝関節伸展トルクがかかった場合、すなわち、大腿四頭筋群が収縮した場合にどうなるかを考える。図7に、クランク角が120°のときの例を示す。
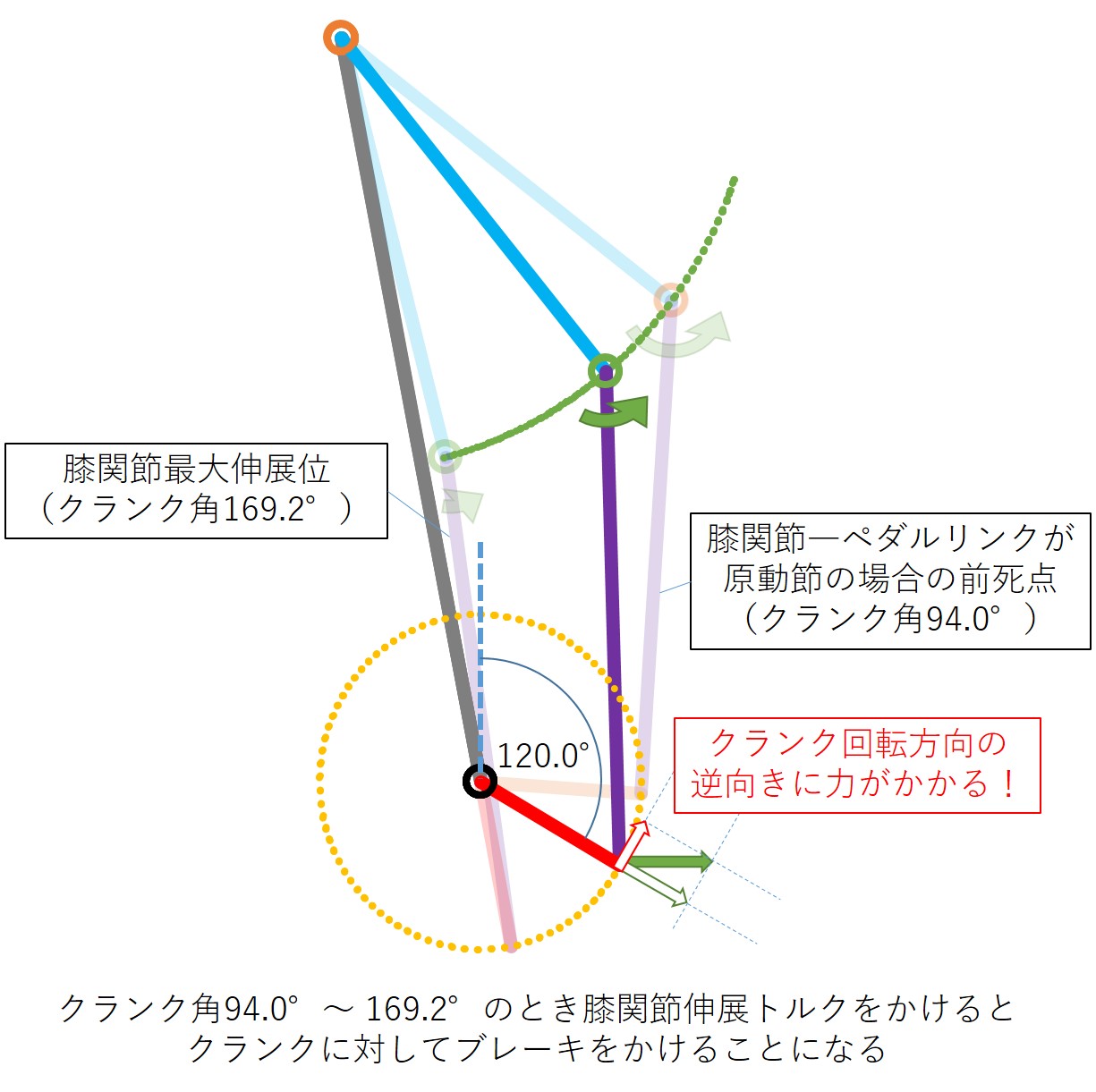
単純なベクトルの分解により、前死点以降の大腿四頭筋群の入力は全てクランクに対してブレーキの作用しか働かないことが分かる。はっきり言って、このケースは論外だ。
次に、前死点と膝関節最大伸展位の間で膝関節屈曲トルクがかかった場合、すなわち、ハムストリング群が収縮した場合にどうなるかを考える。図8に、再びクランク角が120°のときの例を示す。

図7のケースとは違い、膝関節屈曲トルクはクランクに対して回転方向の力を加えることができる。しかし、ハムストリング群の筋収縮は膝関節を屈曲させるのに対し、クランク角94.0°から169.2°の間では機構的制約により膝関節は伸展方向にしか動かない。つまり、筋肉が引き延ばされながら収縮するエキセントリック収縮が生じる。
以下同様に、後死点と膝関節最大屈曲位の間で膝関節屈曲トルクがかかった場合、入力は全てクランクに対してブレーキの作用しか働かず、後死点と膝関節最大屈曲位の間で膝関節伸展トルクがかかった場合、大腿四頭筋群はエキセントリック収縮となる。
2つのリンクが原動節の場合の死点
最後に、膝関節―ペダルリンクと股関節―膝関節リンクが同時に原動節の場合を考える。膝関節―ペダルリンクと股関節―膝関節リンクが1直線で、かつ、その1直線のリンクがクランクと直交しているときに2つのリンクが原動節の場合の死点となる。図9に、2つのリンクが原動節の場合の死点の例を示す。
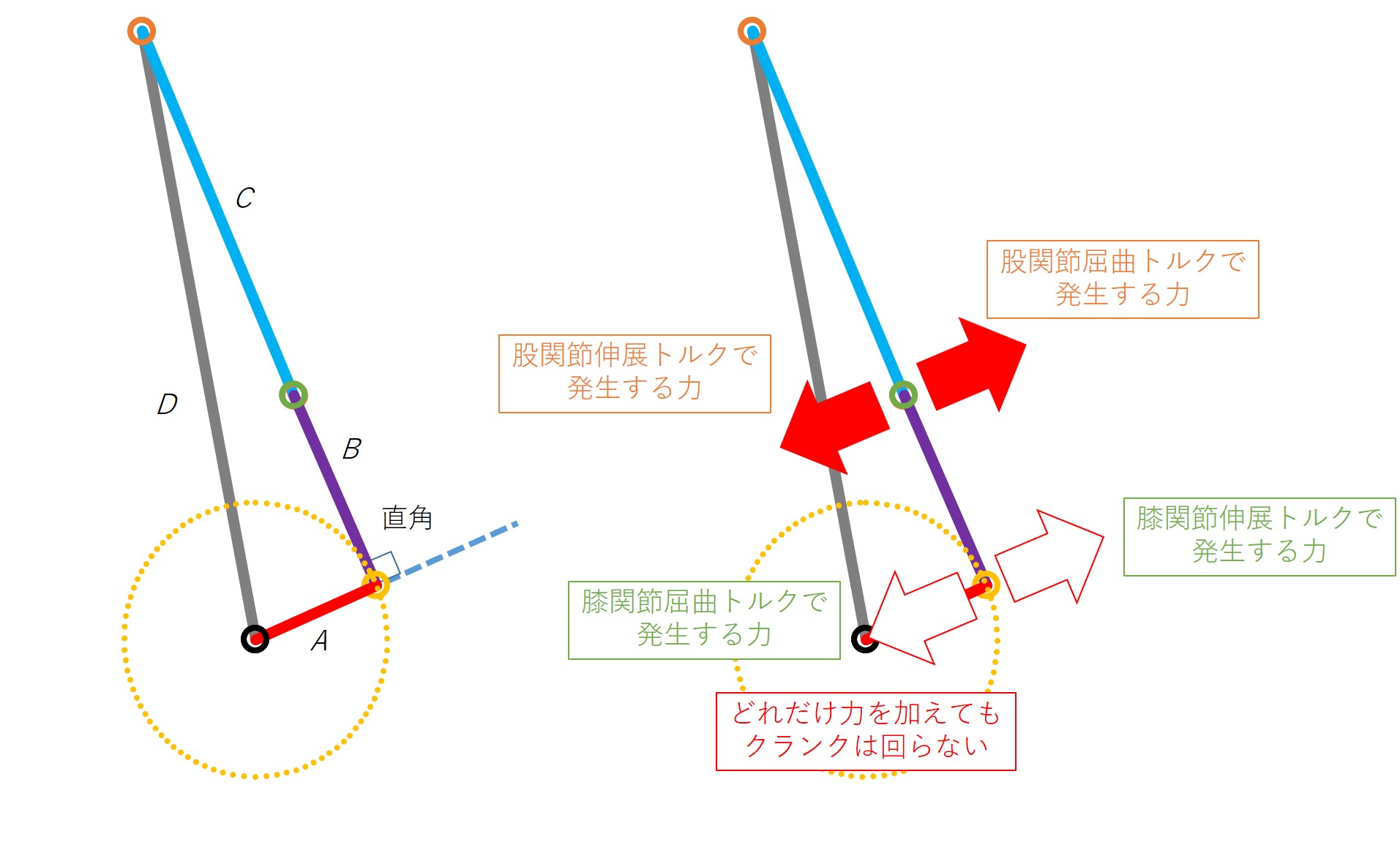
股関節で発生するトルクは中間節(膝関節―ペダルリンク)に対して直交する方向にしか力が加わらないため、クランクに対して力を伝達することが出来ない。また、膝関節で発生するトルクは直接クランクに力を伝達することが出来るが、膝関節―ペダルリンクが原動節の場合で述べたとおり、クランクの法線方向にしか力が加わらないため死点となる。
しかし、図9で挙げたような例はペダリング動作において存在しない。実は、クランクが完全に1回転するためにはリンクの長さに条件があり、これをグラスホフの定理と言う。グラスホフの定理は、

で表される。図9をよく見ると、A + D は B + C よりも明らかに短く、グラスホフの定理を満たしていない。そもそもこのような状態ではクランクが回転しないのだ。
結論として、膝関節―ペダルリンクと股関節―膝関節リンクが同時に原動節の場合の死点は、ペダリング動作においては存在しないと言える。
機構学的に見たエキセントリック収縮が起きない筋収縮のタイミング
エキセントリック収縮が起きなければ筋肉を傷めることが無く、効率的に筋肉を使用できると考えられる。そこで本記事の最後に、今までの知見を用いてエキセントリック収縮が起きないような筋収縮なタイミングについて考察する。
筋肉の機能と4節リンク機構での各関節回転軸の動きが完全に一致する場合のみ、エキセントリック収縮は起きない。図10に、例で使用しているポジションに対する結果を示す。
下死点、膝関節最大伸展位の部分が見にくいので、右側に拡大して表示している。「ハムストリングで踏む」とよく言われるが、もしエキセントリック収縮を起こさせないような筋肉の使い方をしようとすると、ハムストリングは僅か4.1°の間しか有効でない。また、踏み足のフェーズより引き足のフェーズの方が、使用できる筋肉の種類が多いことも分かる。
さて、この筋肉の使い方は本当に実際と一致しているのだろうか。それについては次回に考察する。
まとめ
4節リンク機構に近似したペダリング動作において、各回転軸と筋肉の対応関係について紹介した。また、死点の意味について再考し、ペダリング動作には2種類4か所の死点が存在することを示した。最後に、エキセントリック収縮が起きないような筋肉の収縮タイミングについて考え、機構学的に見ると(大腿二頭筋短頭を除いた)ハムストリング群はほとんど使用しないことが分かった。
次回は、ペダリング動作における筋肉の使われ方を論文等で示された実験データで確認し、4節リンク機構と筋肉の支配神経の観点からその理由について考察する。ハムストリングは本当に要らない子なのか? 次回を待て。
余談:存在しない2関節筋
股関節と膝関節をまたぐ2関節筋を考えるとき、機能の組合せは4通り存在する。すなわち、股関節伸展・膝関節屈曲、股関節屈曲・膝関節屈曲、股関節伸展・膝関節屈曲、そして股関節屈曲・膝関節伸展 股関節屈曲・膝関節屈曲、伸展・屈曲、屈曲・伸展、そして伸展・伸展だ。この4通りの内、面白いことに股関節を屈曲 伸展させると同時に膝関節を伸展させる2関節筋だけは存在しない。
歩行動作や走向動作を考えたとき、脚の2関節筋は地面に対して効率的に前進するエネルギーを伝えることが出来ると言われている。しかし、股関節を屈曲させながら膝関節を伸展させる動作は遊脚期にあたり、足が地面から離れている。従って、地面に対してエネルギーを伝達しなくてよいことから2関節筋は必要なかったのだろう。 しかし、股関節を伸展させながら膝関節を伸展させる動作は立脚中期にあたり、地面に対してエネルギーを伝達するよりも体重を脚で支えたり上体を前方へ移動させることがメインの期間である。地面に対して推進力を与える(エネルギーを伝達する)ことをあまりしない動作のため、この2関節筋は必要なかったのだろう。
(2018年8月2日改訂)
参考文献
稲田重男, 森田鈞: 大学課程 機構学, オーム社, 1966.
D. A. Neumann: 筋骨格系のキネシオロジー 原著第2版, 医歯薬出版, 2012.
最後に
何か間違い等がありましたら、Blogのコメント、Twitterなどでお知らせください。よろしくお願いします。