ペダリングジストニア(発生機序編)
ペダリング時の動作特異性ジストニアに関して、複数回のシリーズに分けてお送りする。シリーズ3回目は、ペダリングスキルの変遷とジストニアの発生機序について考察する。
連載の一覧はこちら。
※諸注意
この記事は、できるだけ客観的なデータや論文に基づいて書くように努力していますが、かなり広範囲にわたって私個人の体験と意見、さらには他人が提唱した仮説を元に構成されています。もしこの記事を参考にする方は、そのことを十分に承知したうえで自己責任でご活用ください。
特に今回の記事は、自分でも突っ込みどころが満載であることを自覚しています。何か間違い等があれば遠慮無く指摘してください。よろしくお願いします。
リンク機構を用いたジストニア発生機序の考察
原因編では、右脚の大腿四頭筋がダメージを負っていたことに触れた。今回は、大腿四頭筋の入力減少とその影響を代償するようなペダリングスキルの学習がジストニアを誘発する要因であることを、5節リンク機構の棒人形モデルを用いて考える。
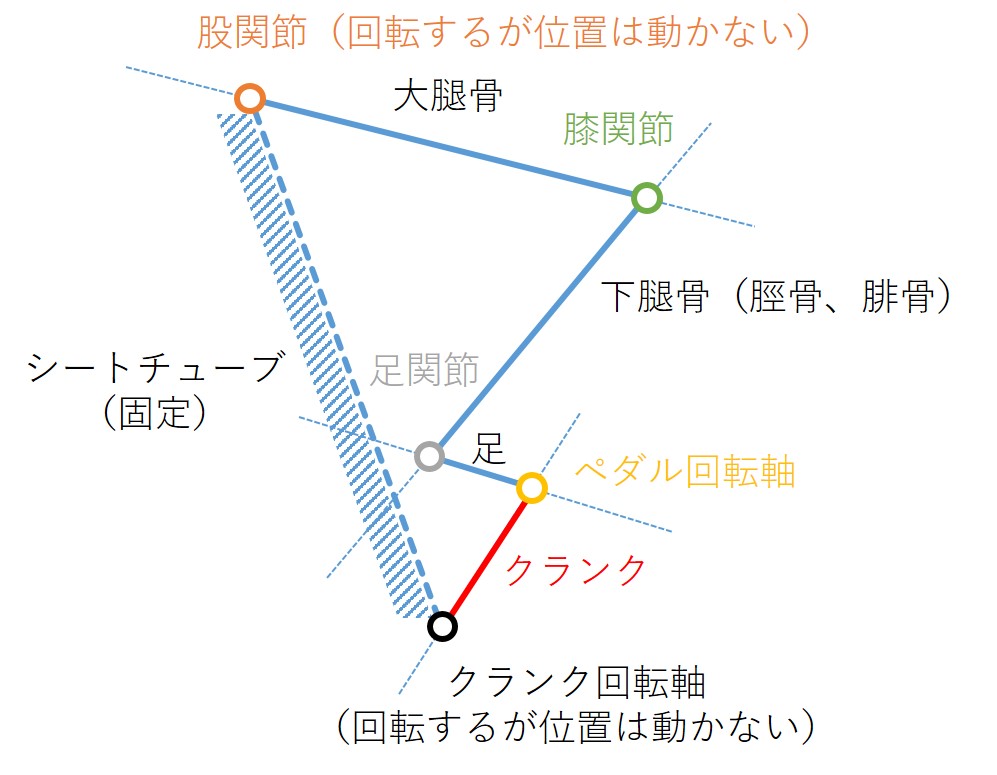
まず、図1に今回使用するモデルを示す。
簡単化のため2次元のモデルとしている。図1におけるクランク角度は1時~2時方向だ。ここで、股関節(大転子)とクランク軸は、回転はするが位置は絶対に動かないものとする。
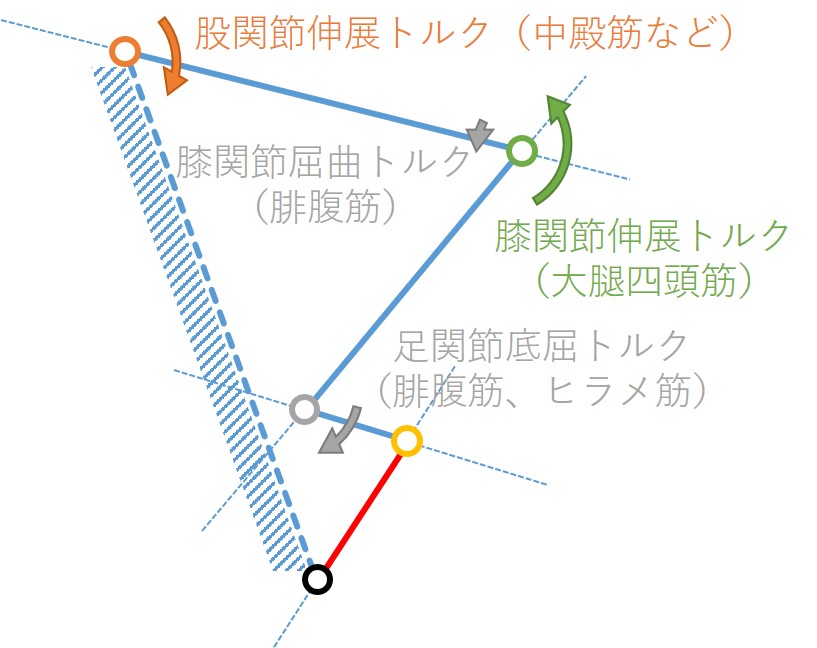
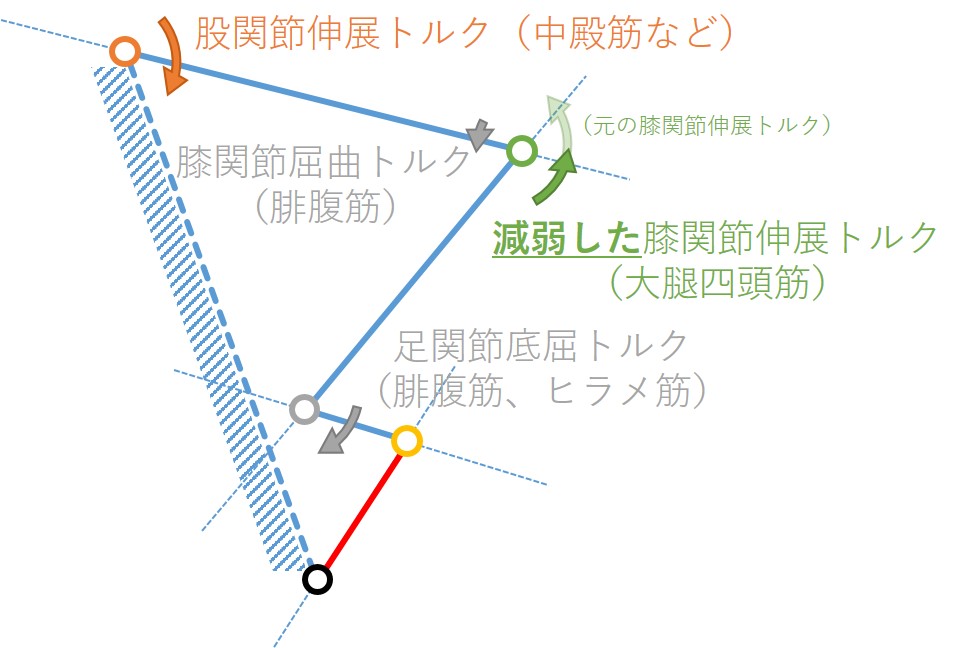
ペダリングをするための力の入力は、股関節トルク(赤)、膝関節トルク(緑)、そして足関節トルク(灰)である。この図においては、股関節と膝関節は伸展方向にトルクをかけている。足関節は底屈方向にトルクをかけている。股関節伸展に対する主動筋は殿筋、膝関節伸展にたいする主動筋は大腿四頭筋、足関節底屈に対する主動筋は下腿三頭筋(腓腹筋、ヒラメ筋)である。
なお、腓腹筋以外にも大腿直筋等2つの関節をまたぐ2関節筋が存在するが、ここでは腓腹筋以外の二関節筋で発生するトルクは全て相殺済みであるとして話を進める。
これら3種類のトルクがペダル(クランク)にどう作用するのか、1つずつ見ていく。
ペダル(クランク)に加わる力の導出
股関節トルクの力伝達
図3に、股関節トルクがペダルに伝わる様子を示す。

この位置関係では、股関節トルクはクランクに対してネガティブフォースを発生させていることが分かる。
膝関節トルクの力伝達
図4に、膝関節トルクがペダルに伝わる様子を示す。

股関節トルクとは反対に、膝関節トルクはちゃんとクランクを回す方向に力が働いていることが確認できる。なお、股関節に発生している力は、股関節が動かないと仮定しているのでペダリング動作に影響しない(実際は、釣り合うような別の力が働いて正味の力が0になっているはずだが、ここでは考えない)。
足関節トルクの力伝達
最後に、膝関節トルクがペダルに伝わる様子を図5示す。
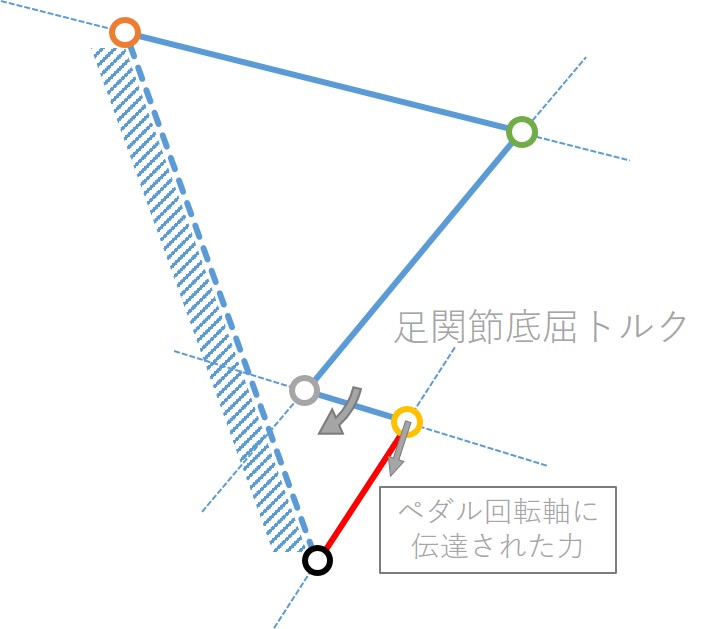
足関節トルクもペダルの回転方向に力は加わっている。図示はしていないが、ペダルのポイントでクランクに加わる力を分解すると、どちらかというとペダルの法線方向に対する力が大きいことが分かる。
ペダルに加わる力の合成
3つのトルクがペダルに与える力が分かったので、これの合力を考えることによって実際にペダル(クランク)にかかる力を求める。まず、ペダルにかかる3つの力をまとめると図6の左側のようになる。
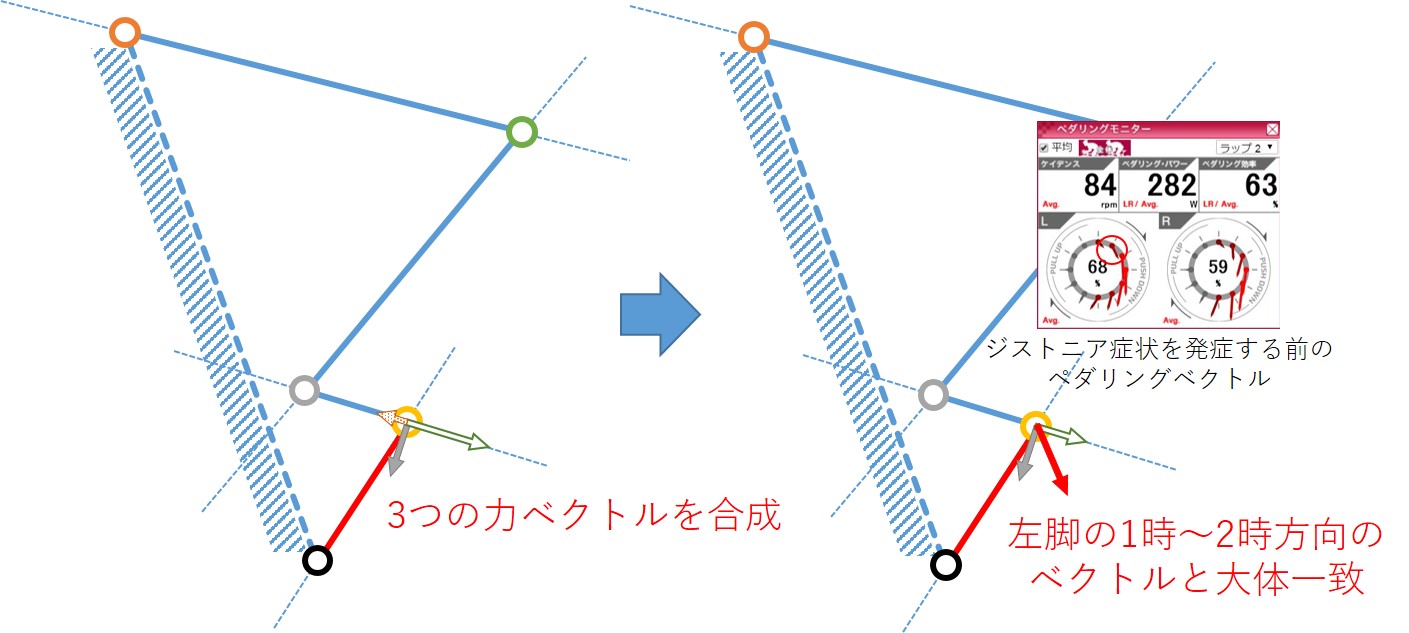
単純なベクトル成分の合成を求めればよいので、結果は図6の右側のようになる。なお、ここに表示されているペダリングモニターのデータは、ジストニアはまだ発症していないものの右脚がややおかしいペダリングになっている状況のときのものだ。導出されたベクトルは、ペダリングモニターの左脚におけるベクトルと大体合致しているのが分かる。
膝関節伸展トルクが減弱した場合
さて、ここまでは正常なトルクがかけられている場合を考えた。ここからは、何らかの原因(例えば筋肉の損傷による筋出力の低下、あるいは神経系統の異常により筋出力が低下)によって、膝関節伸展トルク(大腿四頭筋の筋出力)が減弱した場合を考える。
ここでは、股関節トルクと足関節トルクは図2と同じだが、膝関節トルクが約半分しか出せないものとする。導出過程は省略して、ペダルにかかる力は図8の左側のようになる。
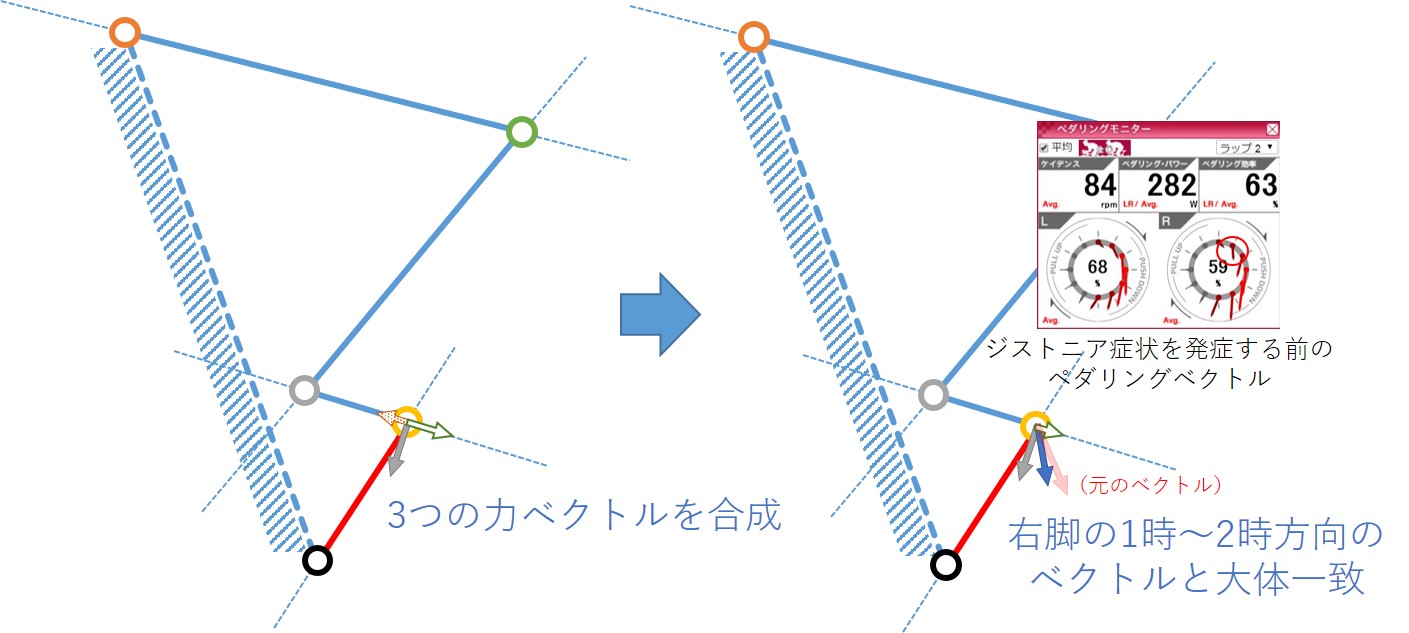
図6と見比べてほしいのだが、明らかにベクトルが下方向へ寄っているのと、クランクの接線方向にかかる力が小さくなっていることが確認できる。
膝関節伸展トルクの減弱を代償するペダリング
さて、レースに向けてパワートレーニングをしている人なら、どうしても以前と同じ(もしくは以前よりも大きい)パワーを出そうと努力するだろう。しかし、大腿四頭筋の故障によって膝関節伸展トルクが以前ほど出すことができなくなってしまった場合、体はどう反応するのだろうか。まずは、膝関節伸展トルクが減弱した場合、正常な場合と比べてどれくらいパワーが減少するかを見ていく。

図9は、正常の場合(図6)と膝関節伸展トルクが減弱した場合(図8)を重ねた様子を表している。赤が正常な場合、青が減弱した場合だ。見ての通り、減弱した場合はクランク接線方向の力が小さくなっているため、正常な場合に比べて明らかにパワーが落ちることが分かる。
さて、この落ちてしまったパワーを膝関節伸展トルク以外で取り戻す方法はあるのだろうか。実は可能である。
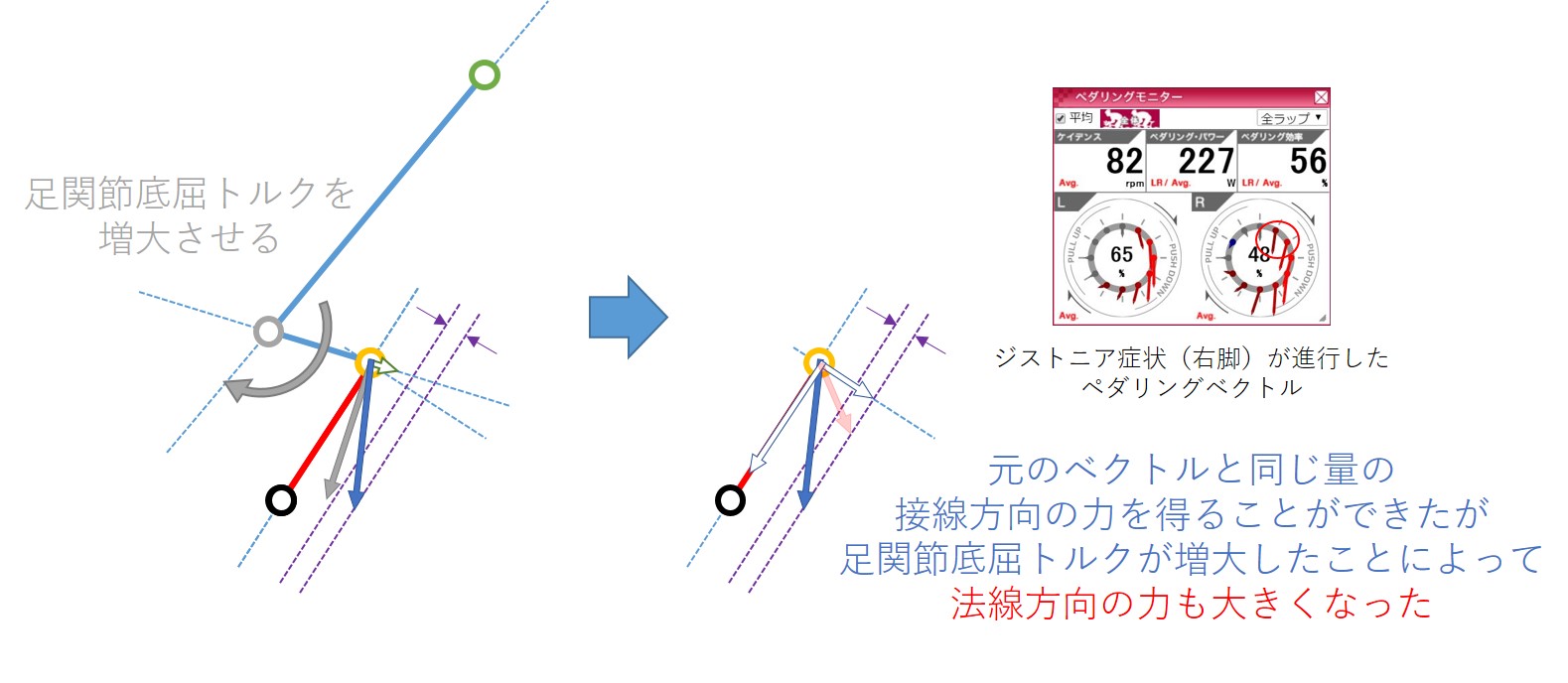
図10は、足関節底屈トルクを増やすことによって以前と同じパワーが出せることを示している。つまり、脳は以前と同じパワーを絞り出すべく足関節のトルクを用いて代償できることを学習するらしい。足関節底屈トルクで代償させることのデメリットは、法線方向にかかる力が増して無駄な力を消費してしまうことだ。
ジストニアを発症させる運動学習
これで一件落着!……となれば問題ないのだが、そうではない。次の図11を見てほしい。
足関節底屈トルクを増やす筋肉は、主にヒラメ筋と腓腹筋である。ヒラメ筋は足関節にのみ作用する単関節筋なのであまり問題ないのだが、腓腹筋は膝関節と足関節をまたぐ2関節筋である。従って、腓腹筋が収縮すると膝関節屈曲トルクと足関節底屈トルクを同時に発生させることになる。残念ながら、ヒラメ筋のみを動かすということは支配神経の構造上ほとんど不可能であるため、腓腹筋とヒラメ筋はセットで動かすしかないのだ。
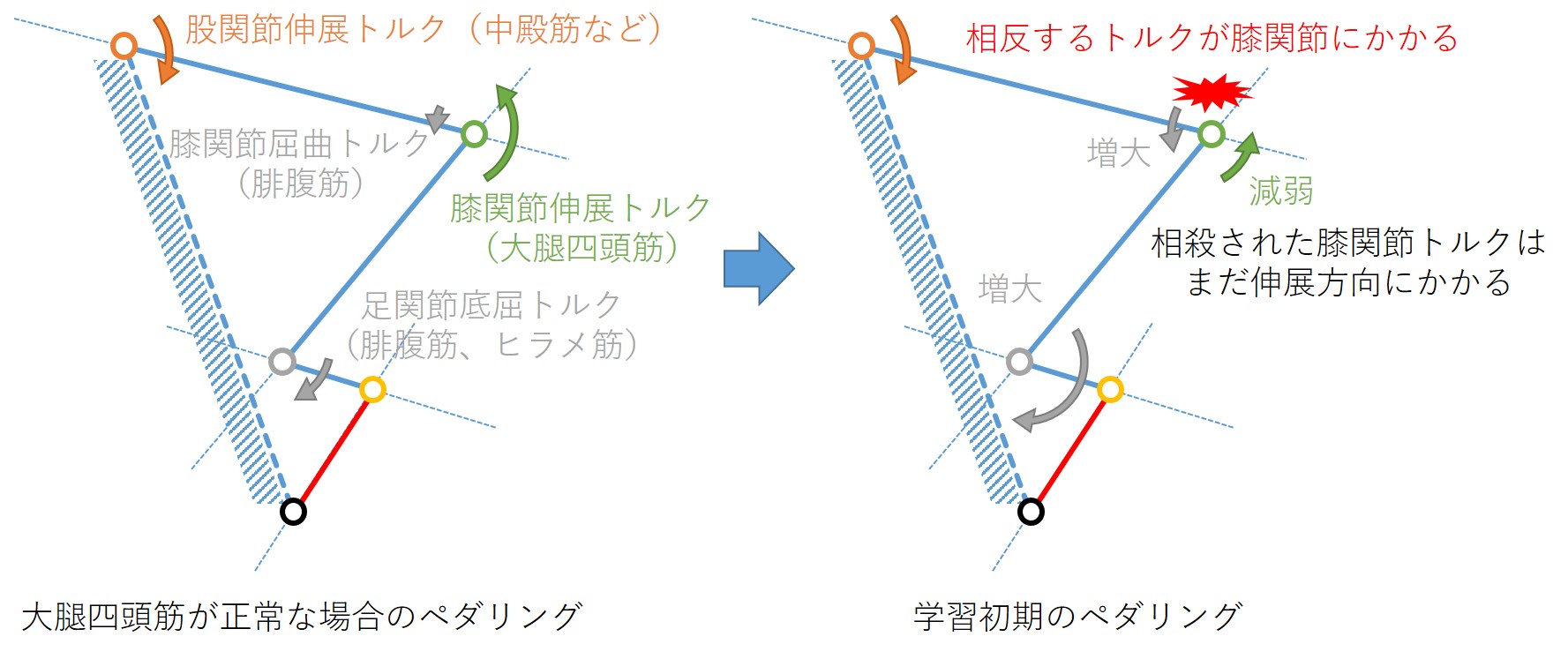
図11の状況では、大腿四頭筋によって膝関節に伸展トルクが発生している。しかし、腓腹筋はその逆である屈曲トルクを発生させる。従って、相反するトルクとなって膝に負荷がかかることになる。脳はこの負荷増大を検知し、負荷を軽減させるような運動を学習しようとする。ここで、大腿四頭筋の力はこれ以上強めることができないので、大腿四頭筋の利用率を下げるという学習がどんどん進むことになる。
膝関節伸展トルクが下がれば、ペダルの接線方向にかかる力は小さくなる。それを代償しようとして足関節底屈トルクがさらに増大する。この悪循環が繰り返されることによって、最終的には膝関節のトルクが伸展方向から屈曲方向へ逆転する瞬間が訪れる。この瞬間こそ、ペダリングが完全におかしくなり自分の意思ではコントロールできない=ジストニアになるタイミングだと私は考えている。
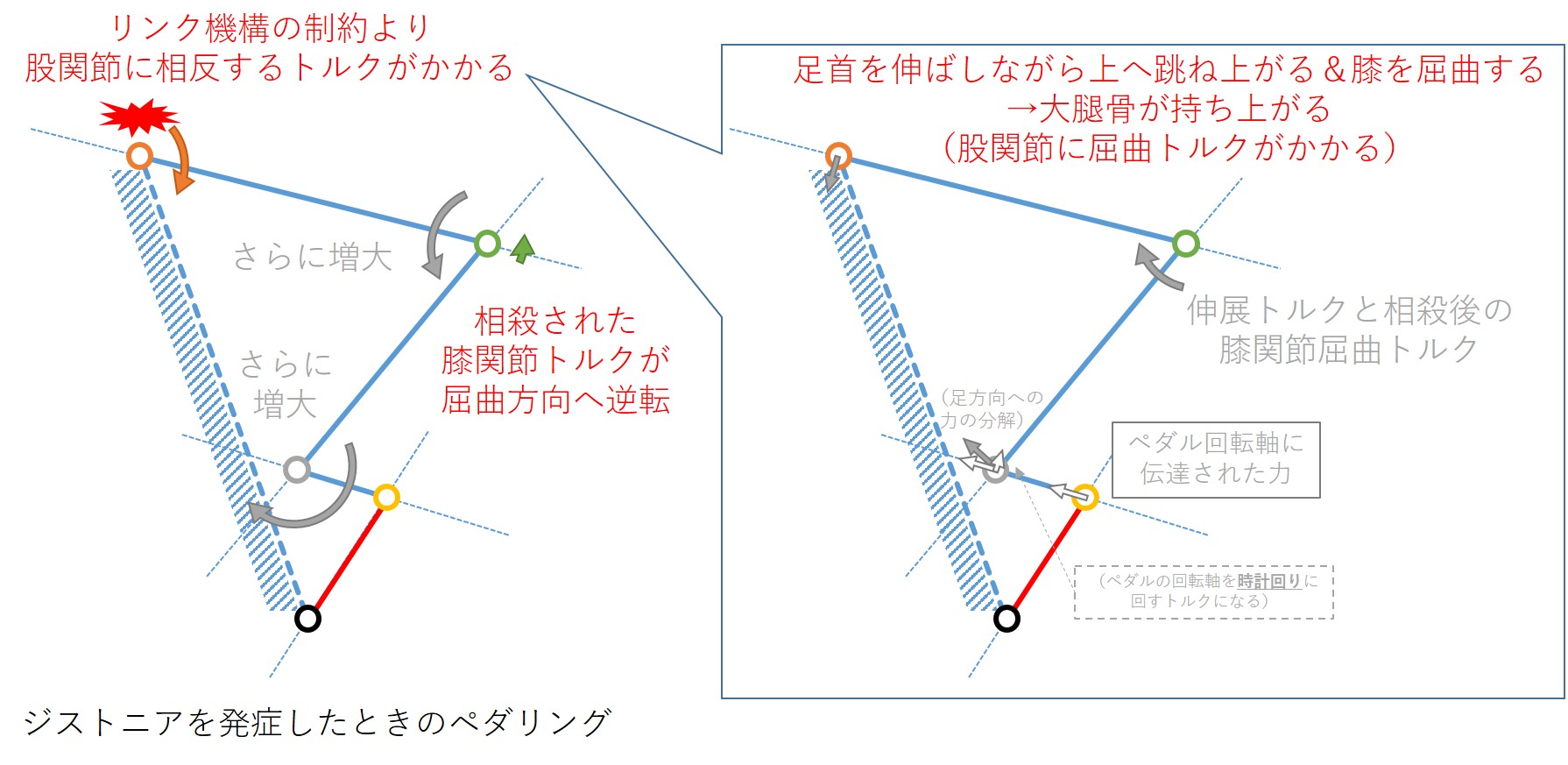
図12は、膝関節伸展トルクと屈曲トルクのバランスが逆転し、屈曲トルクが優位となった状況を表している。図12の右側を見てもらったら分かるように、膝関節屈曲トルクはペダルを逆回転させる方向に力が働く。スムーズなペダリングを阻害することは明らかで、ジストニアになってしまったペダリングがぎこちなかったり最悪途中で止まってしまうのは、これが原因であると考えられる。
また、股関節伸展トルクは足首を下げる方向に力が働くが、膝関節屈曲トルクは足首を持ち上げる方向に力が働く。このバランスが足首を持ち上げる方向に働くようになると、足首が跳ね上がる。跳ね上がった足首は膝を持ち上げ、股関節を屈曲させる。従って、股関節伸展トルクと相反して負荷がかかることになる。ここでも、脳が股関節の負荷を下げる運動、すなわち股関節の伸展トルクを弱める運動を学習する。
関節には可動域があるので、これ以上足首を伸ばすことができないという状態まで学習が進行すると、最終的に図13のようになると考えられる。
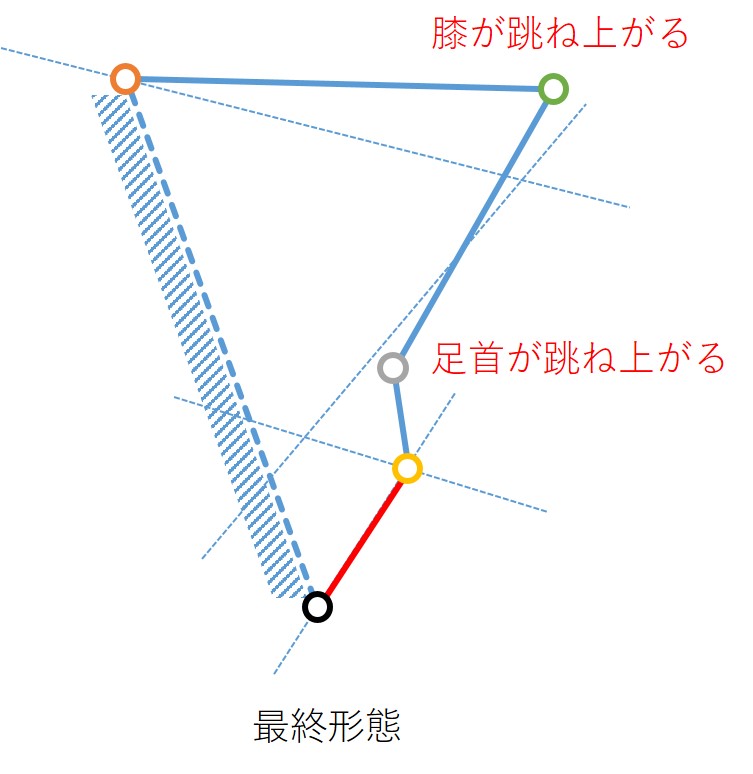
この形は、動画で確認した状況と全く同じである。
ペダリングジストニアが筋肉へ及ぼす影響
間違ったペダリングを習得すると、筋肉の使い方が変わる。ここでは、ジストニアになってしまったときに弱ってしまうと考えられる筋肉を挙げる。
大腿四頭筋
大腿四頭筋は元から故障しているという設定だが、ジストニアを発症したペダリングでは大腿四頭筋を使わないので、さらに弱ると考えられる。
前脛骨筋
前脛骨筋は足首を背屈するときの主動筋であり底屈するときの拮抗筋だが、ジストニアではひたすら足首を底屈する方向に力を使うため、これも弱ると考えられる。実際、ジストニアの発症以降に私の前脛骨筋の左右を見比べたら、全く違っていた(右が少ない)ことを確認している。
腸腰筋
意外と思われるかもしれないが、腸腰筋も弱ると考えられる。太ももを上げる動作を腓腹筋によって行うため、腸腰筋の使用比率が下がるためだ。
まとめ
5節リンク機構のモデルを用いて、ジストニアの発生機序について考察した。その結果、大腿四頭筋故障後も以前と同じパワーを出そうという意識がふくらはぎの筋肉(腓腹筋、ヒラメ筋)の利用を増大させ、「膝関節の負荷を減らすため大腿四頭筋の筋出力低下→パワーを維持するためふくらはぎの筋出力増大」という学習がループすることによって、最終的に不随意運動となってしまったと考えられる。
この記事では、クランクの角度が1時~2時方向の場合でしか考察していない。本来なら、360°全方向に渡って考えるべきだが、局所的な部分だけを考えてもそれなりに合理的な説明ができたと思う。また、ポジションによっても力の加わり方が変わってくるため、さらに検討を重ねる必要がある。
今回この記事を書くに当たって、制御理論を用いて強化学習シミュレーションを作ってみようと思ったのだが、私のスキル不足によって断念した。このシミュレーションを作ることができれば、ジストニアの発症過程を再現できると私は信じている。どなたか知識のある方はトライして欲しいなぁ。
次回は、ジストニアから脱却するリハビリ戦略について述べる。
最後に
何か間違い等がありましたら、Blogのコメント、Twitterなどでお知らせください。よろしくお願いします。